
Fuentes lineales.
Las fuentes Lineales son las mas conocidas por todos nosotros, las que tienen un transformador reductor, un puente de diodos para pasar de alterna a continua pulsante y un filtro con capacitores para poder suavisar lo maximo posible esos picos de la continua pulsante.
Una fuente lineal no regulada puede tener un debanado o multiples debanados, osea puede tener una tension de salida o varias, entre estas varias podrian ser por ejemplo tensiones todas positivas, o todas negativas o mixto, o bien simetrico.
Un ejemplo de una fuente con multiples salidas podria ser la de las fuentes esas que se venden como universales que tienen un interruptor para elegir entre 1.5, 3, 4.5, 6, 7.5, 9 y 12V no son de la mejor calidad pero en si es una fuente con multiples salidas, que lo logran con un transformador con multiples devanados.
Una fuente simetrica puede ser por ejemplo con dos devanados en donde sacamos +/- 12V o 5V o 25V o lo que queramos, usualmente utilizado en todo los circuitos que necesiten tratar señales, ya sean procesadores de señales, placas de sonido, amplificadores de audio, etc..
y luego tenemos las fuentes mixtas que tienen tensiones simetricas y no simetricas, un ejemplo es la fuente de PC, ya que esta cuenta con +12V, -12V, +5V, -5V, +3,3V, etc...
A continuacion dejare los circuitos para que se pueda notar la diferencia entre devanados simples, multiples y mixtos.
 Ahora hablaremos un poco de la teoria de estas fuentes, que pueden ser de media onda, de onda completa con dos diodos o de onda completa con cuatro diodos (puente de diodos).
Ahora hablaremos un poco de la teoria de estas fuentes, que pueden ser de media onda, de onda completa con dos diodos o de onda completa con cuatro diodos (puente de diodos).
Como sabemos el elemento principal es el transformador reductor, este transformador como vamos a usarlo en la red electrica a 50Hz tiene que estar en resonancia a esa frecuencia, por ende como sabemos todas las bobinas y capacitores responden en frecuencia, en una bobina, la frecuencia es inversamente proporcional a la inductancia osea a la cantidad de espiras, por ejemplo a mas frecuencia menos vueltas de bobina y a menos frecuencia mas vueltas.
Para un tranformador de 50Hz en 220V tenemos aproximadamente unas 800vueltas de primario que para la relacion detransformacion tenemos un calculo directo que es Np/Ns = Vp/Vs, que nos dice que N vueltas de primario sobre N vueltas de secundario es igual a Tension del primario sobre Tension del secundario, es decir, si en el primario tenemos N=800 vueltas para 220V, y en el secundario tenemos N=100 vueltas, vamos a tener una tension de salida de 220V/8 = 27,5V. De esta forma se calculan las vueltas de un transformador para calcular la tension que nos entrega. Otro factor a tener en cuenta es el diametro del cobre, mientras mas grande sea este, mas corriente soportara el tranformador por ende mas consumira. De ahi viene que un transformador de 220 a 12 1A es mucho mas chico que uno de 220 a 12 8A, solo por el diamtro del cobre.

El puente de diodos, no es mas que una serie de diodos que va en funcion de la respuesta en frecuencia, la corriente y la tension. Por ejemplo para un transformador de 220 a 12 8A tenemos que usar didos de Si (silicio) de baja frecuencia y de mas de 8A para que no se destruyan y para que respondan bien.
Luego de esto viene el capacitor, que se calcula 1000uF por Ampere de la fuente por ende para esta fuente de 8A tendriamos que usar un capacitor de 8000uF por 12V, pero como no hay esos valores, usaremos un capacitor de 10000uF por 16V o dos capacitores de 4700uF por 16V en paralelo.
NOTA: los capacitores en paralelo suman su capacidad y en serie la restan.
Aquí les dejare un diagrama de una fuente de 12V de media onda, otra de onda completa con dos diodos y otra de onda completa con cuatro diodos y sus respectivos graficos para comprender la señal que entregan.

Ahora que sabemos esto vamos a procedes a estas mismas fuentes pero reguladas mediante reguladores de tension.
Seguramente ya sepan esto pero vamos a darle un poco de refresco, a estas mismas fuentes que mencionamos arriba podemos agregarles reguladores de tension ya sean positivos, negativos, estabilizados o regulables.
Para ello vamos a hablar de los reguladores de National Semiconductors, los conocidos LM, primero empezaremos por los reguladores positivos de la serie LM78XX, donde XX es el valor que va a tomar numerico en funcion de la tension de salida que necesitamos.
Por ejemplo tenemos LM7805, LM7806, LM7808, LM7809, LM7812, LM7815, LM7824 como los mas conocidos y para la rama negativa vamos a tener los mismos valores peor en lugar de LM78XX seran LM79XX, hay que tener en cuenta que si bien fisicamente son iguales, la coneccion no es la misma.
 Tambien tenemos la opcion de utilizar reguladores variables, como el LM317 o LM337
Tambien tenemos la opcion de utilizar reguladores variables, como el LM317 o LM337
 A continuacion dare los circuitos de aplicación para una fuente con 12 y 5V, otra fuente con +/-12 y +/-5V y otra regulable de 1.2V a 30V.
A continuacion dare los circuitos de aplicación para una fuente con 12 y 5V, otra fuente con +/-12 y +/-5V y otra regulable de 1.2V a 30V.
 Fuentes SMPS
Fuentes SMPS
Las fuentes del tipo SMPS (Switching Mode Power Supply) Como lo dice la palabra es una fuente de alimentacion en modo switch. Son las fuentes que tiene la PC, los DVD, los TV, Etc...
Primero deberíamos saber que significa switch de donde viene y como llegamos a esto.
Si bien seguramente se están imaginando un switch como un interruptor, si es así, es un interruptor donde marcamos encendido o apagado, en nuestro casa 1 y 0. Los transistores tienen una curva de respuesta en la que pueden funcionar en corte y saturación, (ademas de trabajar en modo dinámico en el centro de su punto Q “para amplificadores y manejo de señales análogas”), el corte y la saturación de un transistor es lo que lo permite que binariamente el transistor active y desactive sin pasar por los estados intermedios.
Imaginemos una canilla, el transistor se comporta igual, tenemos un flujo de agua que va de colector a emisor o de emisor a colector (dependiendo de la conflagración) y tenemos la perilla que habré, cierra o gradúa el flujo de agua, esto seria la base del transistor.
En nuestro caso seria una canilla que se habré del todo (satura) o se cierra del todo (corta).
Una vez que tenemos en cuenta que el transistor puede trabajar como una llave, en corte y saturación., de ahi viene la palabra switch en la fuente, y porque decimos que es una fuente switch en lugar de una fuente lineal como las que vimos antes, bueno ahora la vamos a buscar otra diferencia a la fuente lineal, sabemos que las dos tienen transformador pero una tiene un transformador grande y la otra uno mucho mas chico.
Remontando nos un poco a los inductores, mas arriba habíamos dicho que a mayor inductancia (mas vueltas de bobina) menor frecuencia, y a menor inductancia mayor frecuencia.
Si para un transformador de 50Hz estamos usando 800 vueltas de primario, entonces para un transformador de mas de 50Hz vamos a usar menos vueltas de primario, y si el transformador trabaja a 50kHz (50000Hz) van a ser muchas menos vueltas, por ende de ahi viene el transformador mas chico, en si es el mismo transformador que en la fuente lineal pero al elevarle la frecuencia podemos reducir su cantidad de espiras y por ende su tamaño y peso.
Ahora que sabemos porque es mas chico el transformador de una fuente SMPS, tenemos el tema que hay que generar esos 50000Hz ya que la red eléctrica domiciliaria solo nos entrega 50Hz, para esto aparece el nombre Switching, acá es donde el transistor de potencia prende y apaga el primario del transformador de 50kHz, osea el transformador que funciona a 50000Hz hay que hacerlo andar a esa frecuencia sino no responde, entonces no nos quedara otra opción que hacerlo oscilar a esa frecuencia o como dicen en la jerga, hacerlo switchear, para esto necesitamos un oscilador que comande un transistor (o varios) que a su vez hagan oscilar al transformador de 50000Hz, una vez que tenemos esto oscilando el transformador ya esta funcionando, y en el secundario solo resta hacer la fuente común, diodos capacitores reguladores etc... solo que ahora ya no estamos en 50Hz sino que estamos en 50000Hz por lo que los diodos no son cualquiera sino que deben ser ultra rápidos, para que respondan a esta frecuencia. hasta ahora tenemos la fuente andando, pero esta fuente como lleva un circuito oscilador para el primario, y el circuito es de continua, necesitamos continua y la tensión de red para alimentar el primario, aquí es donde aparece la fuente directa de los 220Vac, seguramente habrán visto en las fuentes de PC que directo de los 220Vac viene un puente rectificador, unos filtros y un capacitor de como 400uF por 400V, o algo similar. De ahí salen 330Vcc que es la tensión que va a switchear el transistor del transformador. Teniendo esto en cuenta tenemos todo, algunos circuitos osciladores de control de la fuente, aparte de oscilar, controlan la tensión que le llega a la base del transistor, para que no tenga sobre tensiones o subtensiones, esto pasa cuando no hay 220Vac sino que sube la tensión o baja, todo eso se compensa con el control del transistor dejando pasar mas o menos tensión a su base y controlando así la tensión de salida del transformador. También seguro vieron un opto-acoplador por ahí, ese opto-acoplador sirve para dos cosas, primero para saber a que frecuencia esta oscilando realmente en l transformador, y si se va de frecuencia poder auto ajustarla, y la segunda es saber que la tensión de referencia esta bien, si tiene mas o menos la ajusta con el fin de saber que el secundario del transformador esta entregando lo que tiene que entregar, por eso se pone el opto-acoplador de la salida del transformador hacia el integrado de control.
Obviamente el secundario de este transformador al igual que una fuente lineal puede tener varios devanados secundarios o varias tomas en el devanado, de ahí sacamos varias tensiones como por ejemplo las de una fuente de PC.
Ahora dejare un diagrama de bloques.
 Un ejemplo de controlador para estas fuentes puede ser el circuito integrado el SG3524 que posee las siguientes características:
Un ejemplo de controlador para estas fuentes puede ser el circuito integrado el SG3524 que posee las siguientes características:
• Control de los circuitos de potencia PWM
Esto nos garantiza que el transistor que va a switchear al transformador, este optimizando su señal para que con la menor energía se pueda conseguir una buena estabilidad de oscilación.
• Salidas push-pull
Esto nos dice que a la salida podemos conectar transistores switch (para comandar al transformador y hacerlo oscilar) en conflagración Push-Pull (es un transistor para comandar el hemiciclo positivo y otro para el negativo)
• 1% máximo de variación de temperatura
Nos permite mantener estabilidad aun en lugares con temperatura.
• Total de corriente de alimentación inferior a 10mA
Bajo consumo del integrado en función del consumo de la fuente.
• Operación más allá de 100kHz
Nos permite manejar frecuencias que están en el orden de los 100000Hz (usar transforamdores mas chicos con menos vueltas de cobre)
Aqui dejo dos circuitos de aplicacion desde su datasheet, el primero de ellos es una fuente comun SMPS para obtener desde 26Vcc a 5V 5A con el integrado SG3524.
 Aqui dejo otro circuito desde su datasheet pero este es para una fuente Step-UP, osea para elevar la tensión por ejemplo como las de las potencias de auto, que apartir de 12V elevan a +/-50V, etc..
Aqui dejo otro circuito desde su datasheet pero este es para una fuente Step-UP, osea para elevar la tensión por ejemplo como las de las potencias de auto, que apartir de 12V elevan a +/-50V, etc..
En este caso eleva de 5V a +/-15V, no entra mucha corriente, de echo menos de 100mA por lo que solo sirve para circuitos lógicos, pero se puede modificar para mas corriente.

Las fuentes Lineales son las mas conocidas por todos nosotros, las que tienen un transformador reductor, un puente de diodos para pasar de alterna a continua pulsante y un filtro con capacitores para poder suavisar lo maximo posible esos picos de la continua pulsante.
Una fuente lineal no regulada puede tener un debanado o multiples debanados, osea puede tener una tension de salida o varias, entre estas varias podrian ser por ejemplo tensiones todas positivas, o todas negativas o mixto, o bien simetrico.
Un ejemplo de una fuente con multiples salidas podria ser la de las fuentes esas que se venden como universales que tienen un interruptor para elegir entre 1.5, 3, 4.5, 6, 7.5, 9 y 12V no son de la mejor calidad pero en si es una fuente con multiples salidas, que lo logran con un transformador con multiples devanados.
Una fuente simetrica puede ser por ejemplo con dos devanados en donde sacamos +/- 12V o 5V o 25V o lo que queramos, usualmente utilizado en todo los circuitos que necesiten tratar señales, ya sean procesadores de señales, placas de sonido, amplificadores de audio, etc..
y luego tenemos las fuentes mixtas que tienen tensiones simetricas y no simetricas, un ejemplo es la fuente de PC, ya que esta cuenta con +12V, -12V, +5V, -5V, +3,3V, etc...
A continuacion dejare los circuitos para que se pueda notar la diferencia entre devanados simples, multiples y mixtos.
 Ahora hablaremos un poco de la teoria de estas fuentes, que pueden ser de media onda, de onda completa con dos diodos o de onda completa con cuatro diodos (puente de diodos).
Ahora hablaremos un poco de la teoria de estas fuentes, que pueden ser de media onda, de onda completa con dos diodos o de onda completa con cuatro diodos (puente de diodos).Como sabemos el elemento principal es el transformador reductor, este transformador como vamos a usarlo en la red electrica a 50Hz tiene que estar en resonancia a esa frecuencia, por ende como sabemos todas las bobinas y capacitores responden en frecuencia, en una bobina, la frecuencia es inversamente proporcional a la inductancia osea a la cantidad de espiras, por ejemplo a mas frecuencia menos vueltas de bobina y a menos frecuencia mas vueltas.
Para un tranformador de 50Hz en 220V tenemos aproximadamente unas 800vueltas de primario que para la relacion detransformacion tenemos un calculo directo que es Np/Ns = Vp/Vs, que nos dice que N vueltas de primario sobre N vueltas de secundario es igual a Tension del primario sobre Tension del secundario, es decir, si en el primario tenemos N=800 vueltas para 220V, y en el secundario tenemos N=100 vueltas, vamos a tener una tension de salida de 220V/8 = 27,5V. De esta forma se calculan las vueltas de un transformador para calcular la tension que nos entrega. Otro factor a tener en cuenta es el diametro del cobre, mientras mas grande sea este, mas corriente soportara el tranformador por ende mas consumira. De ahi viene que un transformador de 220 a 12 1A es mucho mas chico que uno de 220 a 12 8A, solo por el diamtro del cobre.

El puente de diodos, no es mas que una serie de diodos que va en funcion de la respuesta en frecuencia, la corriente y la tension. Por ejemplo para un transformador de 220 a 12 8A tenemos que usar didos de Si (silicio) de baja frecuencia y de mas de 8A para que no se destruyan y para que respondan bien.
Luego de esto viene el capacitor, que se calcula 1000uF por Ampere de la fuente por ende para esta fuente de 8A tendriamos que usar un capacitor de 8000uF por 12V, pero como no hay esos valores, usaremos un capacitor de 10000uF por 16V o dos capacitores de 4700uF por 16V en paralelo.
NOTA: los capacitores en paralelo suman su capacidad y en serie la restan.
Aquí les dejare un diagrama de una fuente de 12V de media onda, otra de onda completa con dos diodos y otra de onda completa con cuatro diodos y sus respectivos graficos para comprender la señal que entregan.

Ahora que sabemos esto vamos a procedes a estas mismas fuentes pero reguladas mediante reguladores de tension.
Seguramente ya sepan esto pero vamos a darle un poco de refresco, a estas mismas fuentes que mencionamos arriba podemos agregarles reguladores de tension ya sean positivos, negativos, estabilizados o regulables.
Para ello vamos a hablar de los reguladores de National Semiconductors, los conocidos LM, primero empezaremos por los reguladores positivos de la serie LM78XX, donde XX es el valor que va a tomar numerico en funcion de la tension de salida que necesitamos.
Por ejemplo tenemos LM7805, LM7806, LM7808, LM7809, LM7812, LM7815, LM7824 como los mas conocidos y para la rama negativa vamos a tener los mismos valores peor en lugar de LM78XX seran LM79XX, hay que tener en cuenta que si bien fisicamente son iguales, la coneccion no es la misma.
 Tambien tenemos la opcion de utilizar reguladores variables, como el LM317 o LM337
Tambien tenemos la opcion de utilizar reguladores variables, como el LM317 o LM337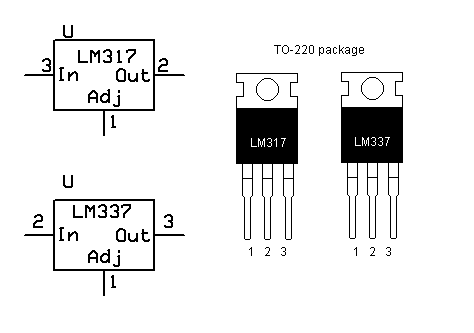 A continuacion dare los circuitos de aplicación para una fuente con 12 y 5V, otra fuente con +/-12 y +/-5V y otra regulable de 1.2V a 30V.
A continuacion dare los circuitos de aplicación para una fuente con 12 y 5V, otra fuente con +/-12 y +/-5V y otra regulable de 1.2V a 30V. Fuentes SMPS
Fuentes SMPSLas fuentes del tipo SMPS (Switching Mode Power Supply) Como lo dice la palabra es una fuente de alimentacion en modo switch. Son las fuentes que tiene la PC, los DVD, los TV, Etc...
Primero deberíamos saber que significa switch de donde viene y como llegamos a esto.
Si bien seguramente se están imaginando un switch como un interruptor, si es así, es un interruptor donde marcamos encendido o apagado, en nuestro casa 1 y 0. Los transistores tienen una curva de respuesta en la que pueden funcionar en corte y saturación, (ademas de trabajar en modo dinámico en el centro de su punto Q “para amplificadores y manejo de señales análogas”), el corte y la saturación de un transistor es lo que lo permite que binariamente el transistor active y desactive sin pasar por los estados intermedios.
Imaginemos una canilla, el transistor se comporta igual, tenemos un flujo de agua que va de colector a emisor o de emisor a colector (dependiendo de la conflagración) y tenemos la perilla que habré, cierra o gradúa el flujo de agua, esto seria la base del transistor.
En nuestro caso seria una canilla que se habré del todo (satura) o se cierra del todo (corta).
Una vez que tenemos en cuenta que el transistor puede trabajar como una llave, en corte y saturación., de ahi viene la palabra switch en la fuente, y porque decimos que es una fuente switch en lugar de una fuente lineal como las que vimos antes, bueno ahora la vamos a buscar otra diferencia a la fuente lineal, sabemos que las dos tienen transformador pero una tiene un transformador grande y la otra uno mucho mas chico.
Remontando nos un poco a los inductores, mas arriba habíamos dicho que a mayor inductancia (mas vueltas de bobina) menor frecuencia, y a menor inductancia mayor frecuencia.
Si para un transformador de 50Hz estamos usando 800 vueltas de primario, entonces para un transformador de mas de 50Hz vamos a usar menos vueltas de primario, y si el transformador trabaja a 50kHz (50000Hz) van a ser muchas menos vueltas, por ende de ahi viene el transformador mas chico, en si es el mismo transformador que en la fuente lineal pero al elevarle la frecuencia podemos reducir su cantidad de espiras y por ende su tamaño y peso.
Ahora que sabemos porque es mas chico el transformador de una fuente SMPS, tenemos el tema que hay que generar esos 50000Hz ya que la red eléctrica domiciliaria solo nos entrega 50Hz, para esto aparece el nombre Switching, acá es donde el transistor de potencia prende y apaga el primario del transformador de 50kHz, osea el transformador que funciona a 50000Hz hay que hacerlo andar a esa frecuencia sino no responde, entonces no nos quedara otra opción que hacerlo oscilar a esa frecuencia o como dicen en la jerga, hacerlo switchear, para esto necesitamos un oscilador que comande un transistor (o varios) que a su vez hagan oscilar al transformador de 50000Hz, una vez que tenemos esto oscilando el transformador ya esta funcionando, y en el secundario solo resta hacer la fuente común, diodos capacitores reguladores etc... solo que ahora ya no estamos en 50Hz sino que estamos en 50000Hz por lo que los diodos no son cualquiera sino que deben ser ultra rápidos, para que respondan a esta frecuencia. hasta ahora tenemos la fuente andando, pero esta fuente como lleva un circuito oscilador para el primario, y el circuito es de continua, necesitamos continua y la tensión de red para alimentar el primario, aquí es donde aparece la fuente directa de los 220Vac, seguramente habrán visto en las fuentes de PC que directo de los 220Vac viene un puente rectificador, unos filtros y un capacitor de como 400uF por 400V, o algo similar. De ahí salen 330Vcc que es la tensión que va a switchear el transistor del transformador. Teniendo esto en cuenta tenemos todo, algunos circuitos osciladores de control de la fuente, aparte de oscilar, controlan la tensión que le llega a la base del transistor, para que no tenga sobre tensiones o subtensiones, esto pasa cuando no hay 220Vac sino que sube la tensión o baja, todo eso se compensa con el control del transistor dejando pasar mas o menos tensión a su base y controlando así la tensión de salida del transformador. También seguro vieron un opto-acoplador por ahí, ese opto-acoplador sirve para dos cosas, primero para saber a que frecuencia esta oscilando realmente en l transformador, y si se va de frecuencia poder auto ajustarla, y la segunda es saber que la tensión de referencia esta bien, si tiene mas o menos la ajusta con el fin de saber que el secundario del transformador esta entregando lo que tiene que entregar, por eso se pone el opto-acoplador de la salida del transformador hacia el integrado de control.
Obviamente el secundario de este transformador al igual que una fuente lineal puede tener varios devanados secundarios o varias tomas en el devanado, de ahí sacamos varias tensiones como por ejemplo las de una fuente de PC.
Ahora dejare un diagrama de bloques.
 Un ejemplo de controlador para estas fuentes puede ser el circuito integrado el SG3524 que posee las siguientes características:
Un ejemplo de controlador para estas fuentes puede ser el circuito integrado el SG3524 que posee las siguientes características:• Control de los circuitos de potencia PWM
Esto nos garantiza que el transistor que va a switchear al transformador, este optimizando su señal para que con la menor energía se pueda conseguir una buena estabilidad de oscilación.
• Salidas push-pull
Esto nos dice que a la salida podemos conectar transistores switch (para comandar al transformador y hacerlo oscilar) en conflagración Push-Pull (es un transistor para comandar el hemiciclo positivo y otro para el negativo)
• 1% máximo de variación de temperatura
Nos permite mantener estabilidad aun en lugares con temperatura.
• Total de corriente de alimentación inferior a 10mA
Bajo consumo del integrado en función del consumo de la fuente.
• Operación más allá de 100kHz
Nos permite manejar frecuencias que están en el orden de los 100000Hz (usar transforamdores mas chicos con menos vueltas de cobre)
Aqui dejo dos circuitos de aplicacion desde su datasheet, el primero de ellos es una fuente comun SMPS para obtener desde 26Vcc a 5V 5A con el integrado SG3524.
 Aqui dejo otro circuito desde su datasheet pero este es para una fuente Step-UP, osea para elevar la tensión por ejemplo como las de las potencias de auto, que apartir de 12V elevan a +/-50V, etc..
Aqui dejo otro circuito desde su datasheet pero este es para una fuente Step-UP, osea para elevar la tensión por ejemplo como las de las potencias de auto, que apartir de 12V elevan a +/-50V, etc..En este caso eleva de 5V a +/-15V, no entra mucha corriente, de echo menos de 100mA por lo que solo sirve para circuitos lógicos, pero se puede modificar para mas corriente.
























